AutoGuide実行編
<起動・事前準備>
WEBで見た画面は日本語だったのになぜか英語表示です。大した問題
ではないのでこのまま使います。
ピクセルサイズ、ガイド鏡焦点距離、ガイドスピード(赤道儀の設定値)
等を入力してprofileを作成します。
Dark Libraryがあった方がよいということなので作成します。
<赤道儀の動作確認>
まず、GuideをOFFにして赤道儀本来の追尾性能を確認してみます。
グラフを表示してみると、折れ線がカメラ画像から解析した方位のズレ
を示しているようです。
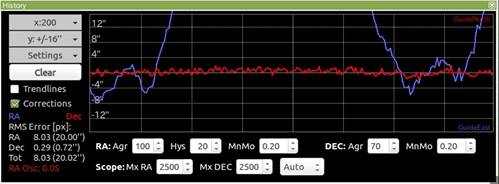
Declination(DEC)はほぼ0近辺をうろついているので極軸は正し方位に
向いているようです。
Right Ascension(RA)はグラフからはみ出して東側に大きく変動していま
す。カメラ画像の解析結果ではRMSでも20”と表示されています。小さい
方がよいですがそれならばガイドする必要もないので、こんなものなので
しょうか?
よく見るとRAが東側に外れている間はDECも北寄りにいるようです。
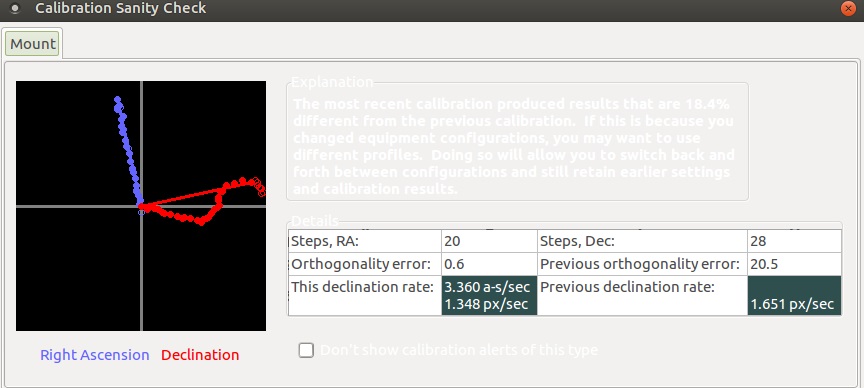
多分、キャリブレーションで画角と実角の誤差を追い込み切れていないの
だと思います。
特にキャリブレーションエラーは出力されませんでしたが、結果を見ると
下のように表示され、説明書によると風などの影響による異常と記載されて
います。風はなかったので、マウントに問題があるかもしれません。
カメラの設置角の問題もあるかと思い検討しましたが、結論としては、
あまり関係がありません。詳しい内容は省きますが、各センサー間で感度
が極端に違わなければ、各センサーで測定された光の強度から導かれる星
の中心座標がカメラの設置角から受ける影響は無視できるほど小さいこと
がわかります。
<ガイド開始>
折れ線はカメラ画像から解析したズレで、棒グラフが補正量を示してい
るようです。

Noguideよりも良好ですがRAの方はときどき大きく変動しています。
これも対策する必要はありますが、問題はDECの方です。ガイドOFFの
方が良好ではないですか。DECのAggressivenessを下げるか、OFFにした
方が良さそうです。
画像を取り忘れましたが、DEC:Agrを10%にすると安定しました。
さて、RAの方はどうしましょう。
'Analyzing PHD2 guiding a basic tutorial'というpdfがあったので、その
うち読んでみます。